...
- Yellow: These regions are in control of setting the output signals. These output signals are what is used to set the GPIO pins outside of the controller. The
delayedregions are just a simple extension on top of theactuateregions. - Red: These two regions control launching.
manual launchingjust holds both flippers up for a long enough period for the machine to launch the ball into the game. The other region is in charge of detecting when the launch lamp is blinking and then waiting the appropriate amount of time to acquire the 20 million launch bonus. - Blue: These are the main brain of the controller. These regions retrieve ball positions, ask for predictions on future ball positions, process a little game information to determine possible targets and decide when and how to actuate the flippers.
Main Flipper Controller
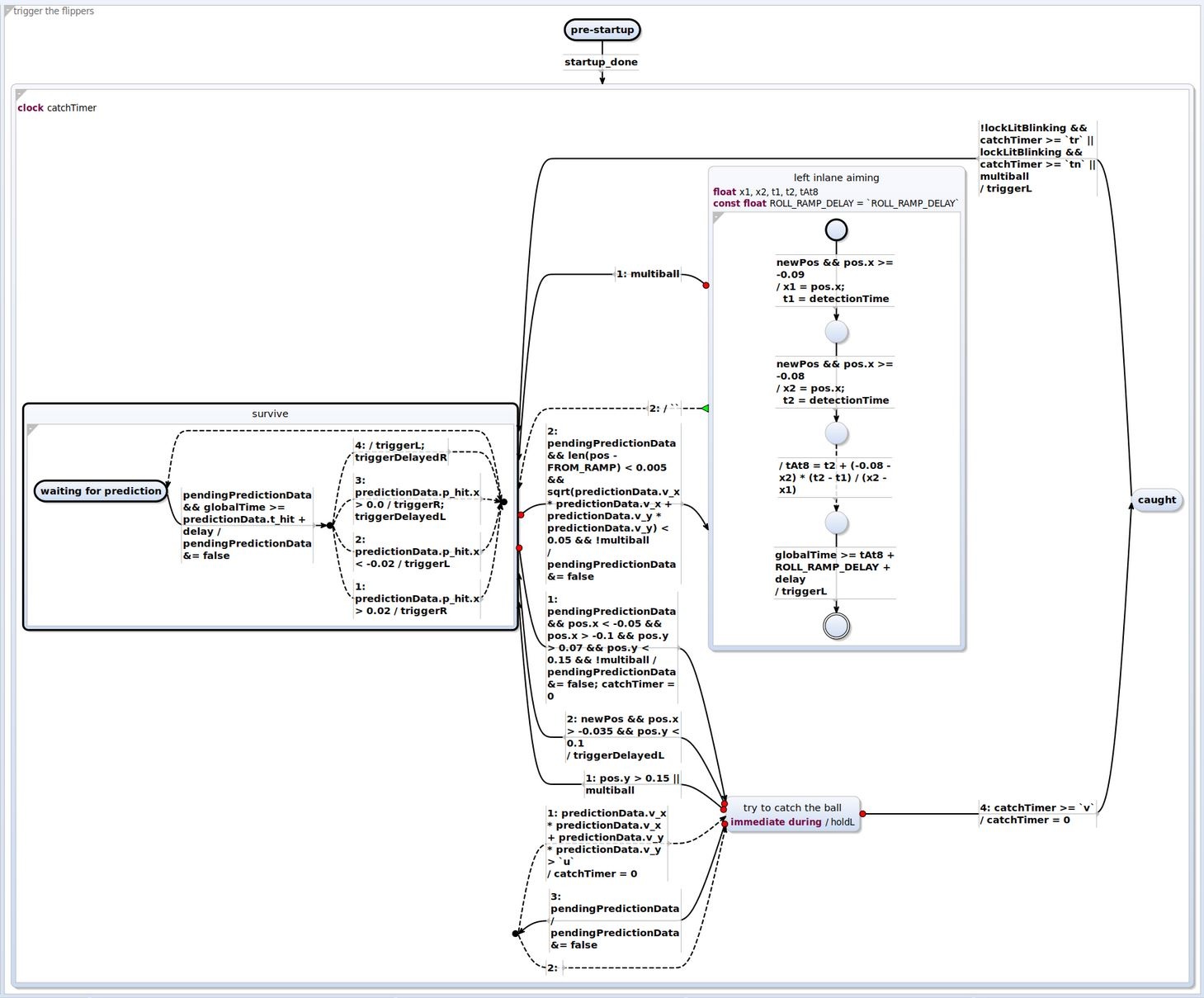
Arguably the most central element of a flipper autopilot is the module that decides when to trigger the flippers. In this system said descision is mainly made in the region displayed above. Most of the time while playing the automaton will be in the survive state, where it reacts to the times as given by the prediction. Here the only objective is to keep the ball in the game.
In certain situtations this state is left in order to perform more elaborate gameplay maneuvers.
One of these is to catch the ball with left flipper. Once this was successfully performed targeted shots to certain game elements are possible and the controller decides which one to aim for by analyzing some lamps that indicate certain game situations. The rule of thumb is: When there is a lamp lit above some target, it should be aimed at.
Another one is to detect a ball coming back after successfully hitting the big ramp. The ball is then led down a deterministic path feeding it into the left inlane. In this situation the controller tries to trigger the left flipper at the right timing to shoot the ball right into the big ramp again. This is useful since successive ramp shots are benefitial in most situations, as they score good points and lead to activation of a multiball mode.
Actuating
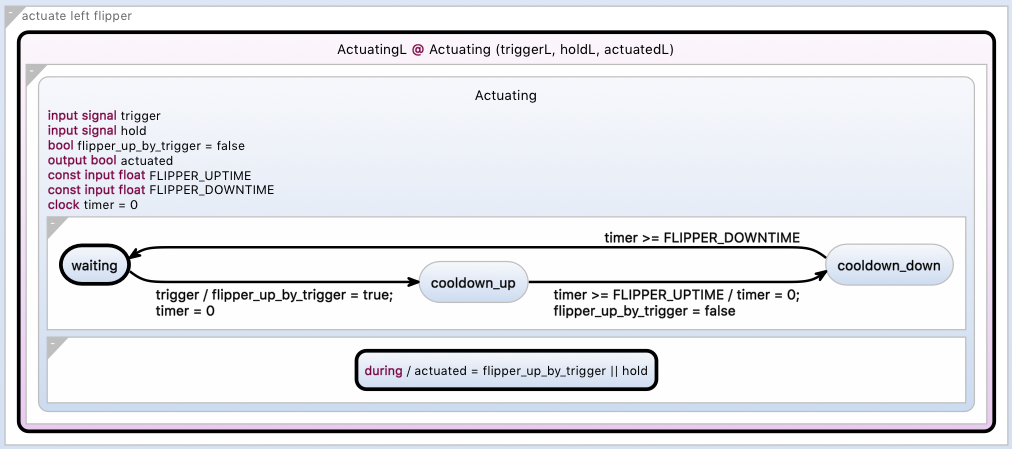
The actuation of flippers is implemented via a common automaton to which the appropriate signals are connected. The connected output signals are what is used to set the values of the GPIO pins by the outside system. With the trigger signal a standard actuation of the flipper can be initiated. The automaton waits after enabling and disabling for the real world to catch up, as the flipper arms take some time to move from their resting position and back. Additionally there is a hold signal which can be used from the outside to basically override the behaviour regarding the cooldown.
...