Page History
| Panel | ||||
|---|---|---|---|---|
| ||||
Responsible:
Related Theses:
|
...
Related Papers:
|
The Priority-Based Compilation
The priority-based low-level compilation approach uses the established compiling chain for SCCharts until the dependency analysis of the SCG is finished. From this point, either the netlist low-level compilation approach or the priority-based low-level compilation approach can be used to generate C code. Because of the different approaches, it is possible, that one of the compiler finds a valid schedule for an SCChart, while the other fails.
| Table of Contents |
|---|
General
In contrast to the netlist compiler, this compiler targets only software. It is able to schedule cycles, as long as they only contain transition edges. This restriction is necessary to ensure, that the sequentially constructive model of computation is not violated.
The priority-based low-level compilation approach compiles an SCG enriched by the results of the dependency analysis to SCL_P, whose basis is the programming language C and which is enriched by the SCL_P macros. Therefore the regions of the SCG are fragmented into threads, whose priority determines the order in which the threads are executed. A thread might change its priority, which results in a context switch. The adiministration of the threads is done by the SCL_P macros. As the calculation of the thread priorities is not trivial, it done stepwise, which should help the user to understand how it is done. This is provided by a KiCo compilation chain, which can be called from the SCCharts editor or from the SCG editor.The image below shows the compilation chain as shown by the SCChart editor:
...
This transformation step uses the results from the dependency analysis. It checks, whether a valid schedule for the SCG exists and calculates the node priorities afterwards. Therefore, the strongly connected components of the SCG are calculated, where the nodes of the SCG are the nodes of directed the graph which is connected by dependency and transition edges. Pause edges are ignored. If such a strongly connected component contains a dependency edge, the SCG is not schedulable. Otherwise, the SCG is schedulale and the node priorities, which are crucial for the schedule, can be determined. The priority of a node is the longest path originating from that node, where strongly connected components are considered as a single node and transition edges have weight 0 and dependency edges have weight 1. Again, pause edges are ignored. The theoretical foundation of this transformation step can be found here.
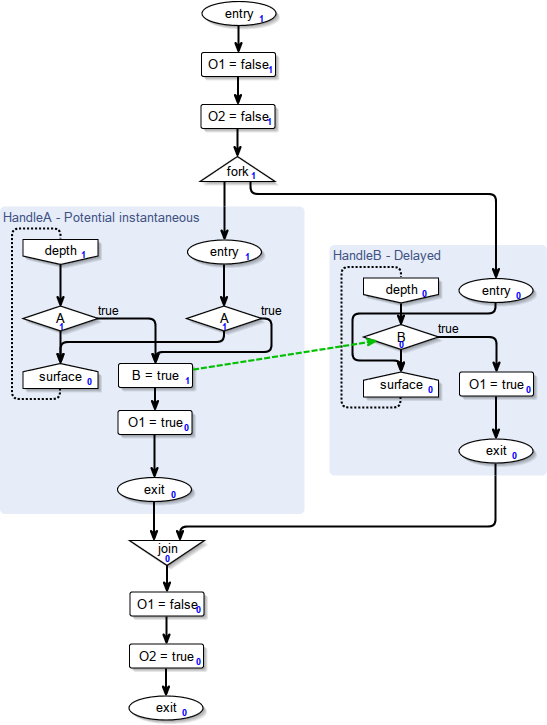
The image shows the resulting node priorities for ABO (blue).
...
Overview
Content Tools